Konsep Dasar
| Istilah | Penjelasan |
|---|---|
x | Nilai asli dari sensor (Raw Data) — input dari semua rumus kalibrasi |
| Sintetik Data | Hasil kalibrasi dari x — digunakan di seluruh tampilan sistem |
| Raw Data | Nilai mentah sensor — disimpan sebagai referensi, tidak berubah |
- Kalibrasi hanya berlaku untuk data baru — data historis tidak akan berubah
- Jika tidak ada kalibrasi yang dikonfigurasi, sistem menggunakan nilai default:
x(raw = sintetik) - Perubahan unit (misalnya dari
cmkemeter) hanya mengubah label — nilai berubah hanya jika rumus kalibrasi diubah
Tiga Metode Kalibrasi
Berbasis Rumus
Transformasi matematis langsung menggunakan nilai sensor
xBerbasis Parameter
Menggunakan nilai sensor lain dalam satu device sebagai referensi
Berbasis Dataset
Konversi non-linear menggunakan tabel lookup
1. Kalibrasi Berbasis Rumus
Metode paling umum — menggunakan rumus matematika denganx sebagai nilai sensor.
Contoh rumus:
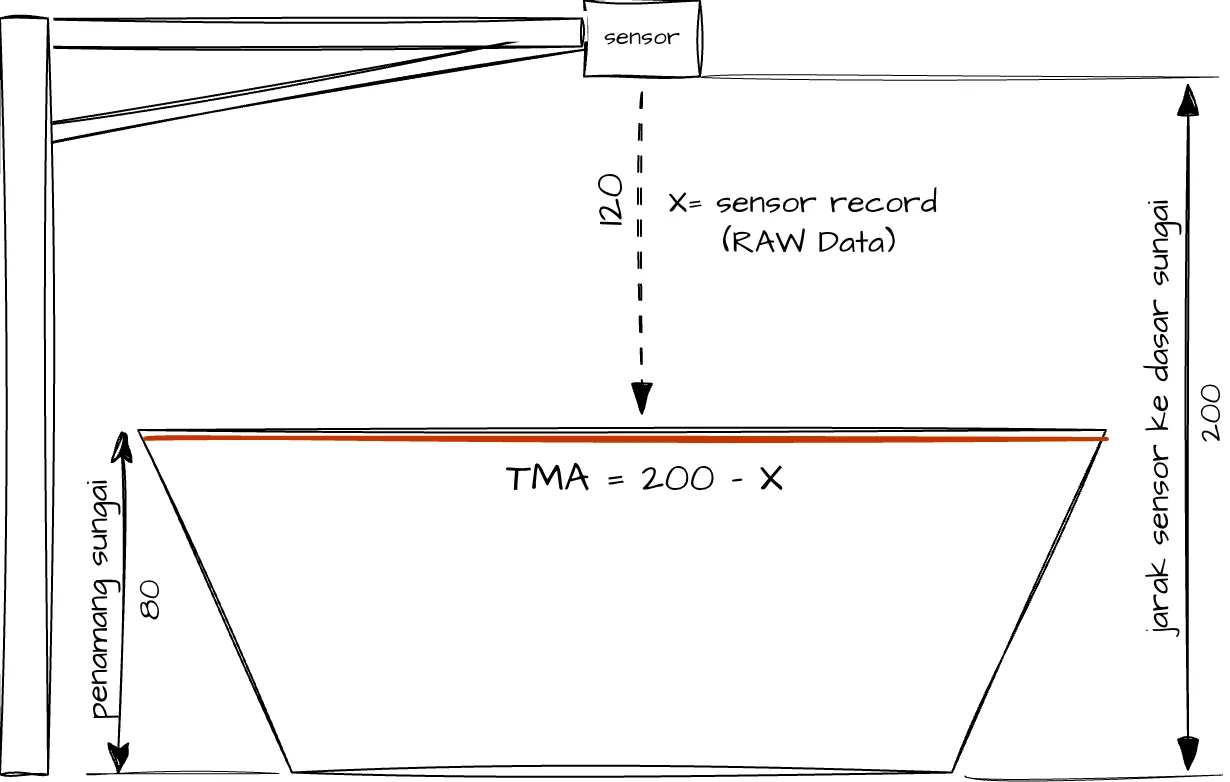
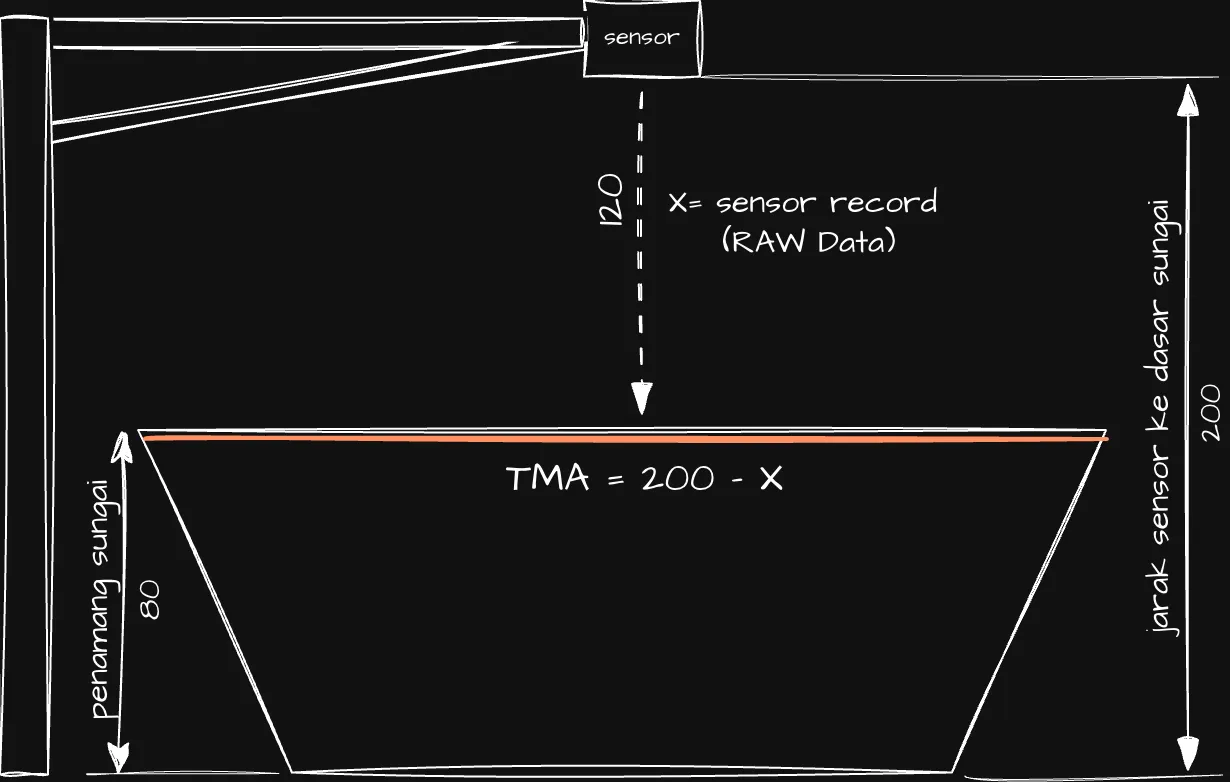
200 - x:
| Nilai | |
|---|---|
Raw Data (x) | 120 |
| Sintetik Data | 80 |
| Perhitungan | 200 - 120 = 80 |
2. Kalibrasi Berbasis Parameter
Menggunakan nilai sensor lain dalam device yang sama sebagai bagian dari rumus kalibrasi. Format:[id_sensor]
| Parameter | ID Sensor | Rumus Kalibrasi | Keterangan |
|---|---|---|---|
| Water Level (cm) | RYG8-flLev | x | Nilai asli, tanpa perubahan |
| Water Level (m) | RYG8-flLev | x / 100 | Konversi cm → m |
| Debit (m³/s) | RYG8-flw | 3.6156 * ((302 - [RYG8-flLev]) ** 1.7461) | Rating curve dari water level |
x = 200 cm:
| Parameter | Nilai | Satuan |
|---|---|---|
| Raw Data | 200 | cm |
| Water Level (dikalibrasi) | 2 | m |
| Debit | 12.13 | m³/s |
3. Kalibrasi Berbasis Dataset
Digunakan untuk konversi non-linear berdasarkan tabel referensi (lookup table). Cocok untuk hubungan antara dua parameter yang tidak dapat direpresentasikan dengan rumus matematika sederhana. Fungsi:| Argumen | Keterangan |
|---|---|
"slug_dataset" | Identitas dataset yang telah diunggah |
nilai_input | Nilai yang akan dicari di kolom referensi (kolom pertama dataset) |
"kolom_output" | Nama kolom hasil yang ingin diambil |
| water_level | area |
|---|---|
| 4.0 | 40.4 |
| 3.9 | 39.0 |
| 3.8 | 37.7 |
| 3.7 | 36.5 |
| … | … |
| 0.0 | 1.1 |
| Bagian Rumus | Keterangan |
|---|---|
[RYG8-flVel] | Nilai kecepatan aliran dari sensor |
[RYG8-flLev] / 100 | Tinggi air dalam meter (dikonversi dari cm) |
DATASET(...) | Mencari luas penampang basah berdasarkan tinggi air |
| Hasil | Debit = kecepatan × luas penampang (m³/s) |
Pastikan nilai input berada dalam range yang tercakup oleh dataset. Nilai di luar range dapat menghasilkan output kosong atau tidak akurat. Lihat panduan lengkap di Manajemen Dataset.
Operator yang Didukung
| Operator | Simbol | Contoh |
|---|---|---|
| Penjumlahan | + | x + 10 |
| Pengurangan | - | x - 5 |
| Perkalian | * | x * 2 |
| Pembagian | / | x / 100 |
| Pangkat | ** | x ** 2 |
| Akar kuadrat | sqrt(n) | sqrt(x) |
| Eksponensial | exp(n) | exp(x) |
| Nilai absolut | abs(n) | abs(x) |
| Sinus | sin(n) | sin(x) atau sin(torad(90)) |
| Kosinus | cos(n) | cos(x) atau cos(torad(90)) |
| Tangen | tan(n) | tan(x) atau tan(torad(90)) |
Fungsi trigonometri (sin,cos,tan) menggunakan radian secara default. Jika nilai input dalam derajat, gunakantorad()untuk konversi:sin(torad(90)).
Cara Mengatur Kalibrasi
Kalibrasi sensor dapat diakses melalui dua jalur:- Dari Manajemen Device
- Dari Manajemen Sensor
Buka daftar sensor
Masuk ke tab atau menu Sensor Device untuk melihat semua sensor pada device tersebut.
Buka pengaturan kalibrasi
Klik badge kalibrasi pada sensor yang ingin dikonfigurasi. Panel kalibrasi akan terbuka.
Input rumus kalibrasi
Panel kalibrasi terdiri dari dua bagian:
- Tabel kiri — menampilkan referensi data raw vs sintetik untuk validasi
- Form kanan — tempat menginput rumus kalibrasi
= untuk membuka daftar sensor dan dataset yang tersedia. Pilih sensor atau dataset untuk menyisipkan ID-nya ke dalam rumus secara otomatis.Atur unit output (opsional)
Jika kalibrasi mengubah satuan (misalnya
cm → meter), perbarui field Unit sesuai satuan hasil kalibrasi.Ingat: mengubah unit tidak mengubah nilai — perubahan nilai hanya terjadi melalui rumus kalibrasi.Memilih Metode yang Tepat
| Kondisi | Metode yang Direkomendasikan |
|---|---|
| Koreksi offset atau perubahan skala sederhana | Rumus (x) |
| Konversi unit (cm → m, °F → °C) | Rumus (x) |
| Menghitung parameter dari kombinasi sensor lain | Parameter ([id_sensor]) |
| Membuat virtual sensor (debit, dll.) | Parameter ([id_sensor]) |
| Hubungan non-linear yang tidak bisa dirumuskan | Dataset (DATASET()) |
| Lookup tabel penampang, kurva rating, dll. | Dataset (DATASET()) |